Mi is valójában a motoripar legújabb fétise, az IMU?

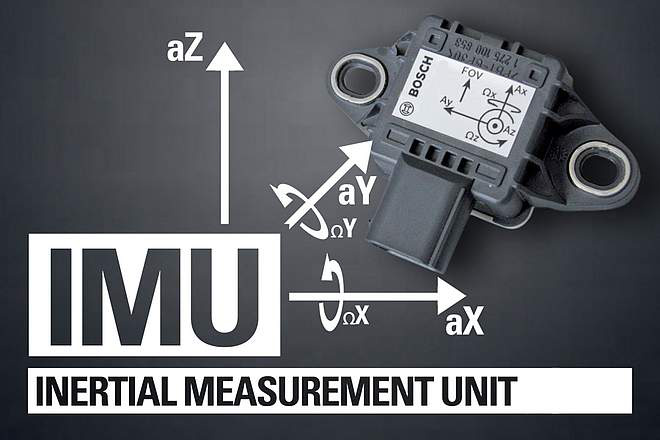
Rajtautomatika, kipörgésgátló, kanyar-ABS - ezek csak az elmúlt pár évben lettek a szériamotorok részei, de jelenleg a motoripar legnagyobb slágerei. Például a Ducatinál az összes 2019-es újdonságnál már alap a kanyar-ABS. És mivel egy potenciálisan életmentő extra, ráadásul olcsó, kicsi és könnyű, nem igazán van érv, hogy miért ne kéne minden motorba ilyen. És márkától függetlenül ezek minden motorban ugyanúgy működnek, a lelkük ugyanaz a Bosch szenzor, az úgynevezett inerciális mérőegység, az IMU (Inertial Measurement Unit).
Ahhoz, hogy megértsük, mi ebben a trükk, meg kell érteni, miért van rá egyáltalán szükség. Kipörgést vagy blokkolást gátolni nem különösebben bonyolult feladat, legalábbis akkor, ha motor egyenes irányban mozog, ilyenkor ugyanis elég a kerekek forgáskülönbségét alapul venni. A kanyarban viszont hirtelen minden bonyolultabb lesz. Ahogy a motor kanyarban bedől, a kerekek effektív átmérője csökken, ráadásul általában a szélességük és a profiljuk sem egyezik, így ilyenkor méréseken megcsúszás nélkül is különböző forgási sebességet látnánk, így a sima, forgáskülönbségből kalkuláló rendszerek kanyarban egyszerűen nem működnek megfelelően.

Ilyenkor tehát a két kerék fordulatszámánál több információra van szüksége a kipörgésgátlónak és az ABS-nek ahhoz, hogy helyes döntést tudjon hozni: ismernie kell a fordulás ívét, a dőlésszöget, a gyorsulást, a lassulást, az oldal irányú mozgást. Ezeket az információkat szállítja az IMU, és ezek adatok birtokában már lehet olyan szoftvert írni, ami képes kezelni az összetett helyzeteket.

Feltűnhetett, hogy az IMU-nak nem volt evolúciója, egyszerűen csak lett, de azért előzménynek kellett két kulcsfontosságú technológia. Az egyik a ride by wire gázkar, ami mostanra az Euro4-es motoroknál előírás lett, ennek az a lényege, hogy a gázkar igazából csak egy potméter, nincs fizikai kapcsolatban a fojtószeleppel, hanem a kettő között ott van egy számítógép. Ez azért fontos, mert így az elektronika nemcsak a gyújtásra hat, hanem már a motorba áramló levegő-üzemanyag keverék adagolásában is, vagyis a kipörgésgátló közbeavatkozása nem csak gyújtásmegszakításból áll, hanem finoman képes a teljesítményt is szabályozni. Ettől nem egy digitális érzetű (nulla vagy egy) a közbeavatkozás, hanem finomak az átmenetek.
A másik előfeltétel az úgynevezett Microelectronic Mechanical Systems (tükörfordításban mikroelektronikus mechanikus rendszer) volt, röviden a MEMS volt. Bár a MEMS ránézésre hasonlít egy számítógépes chipre, és azokhoz hasonlóan nyomtatott áramkörre szerelhető, valójában egy nagyon-nagyon apró mechanikus érzékelő - gyorsulásmérőkből és giroszkópokból áll. Ez az IMU lelke.
A gyorsulásmérők rugókra függesztett súlyokat használnak, ezt úgy érdemes elképzelni, hogy a kis golyót mondjuk négy irányból - jobbról, balról, elölről, hátulról - kikötünk rugókkal, és ahogy elmozdul, a rugók nyúlása mutatja annak irányát és nagyságát. Mivel a rugók erőssége és az elmozduló súly tömege ismert, ezekből az adatokból már lehet számolni. Ez a mérési módszer nem új, a MEMS azzal forradalmi, hogy mindezt sikerül mikroszkopikus méretben megépíteni és sorozatgyártani.
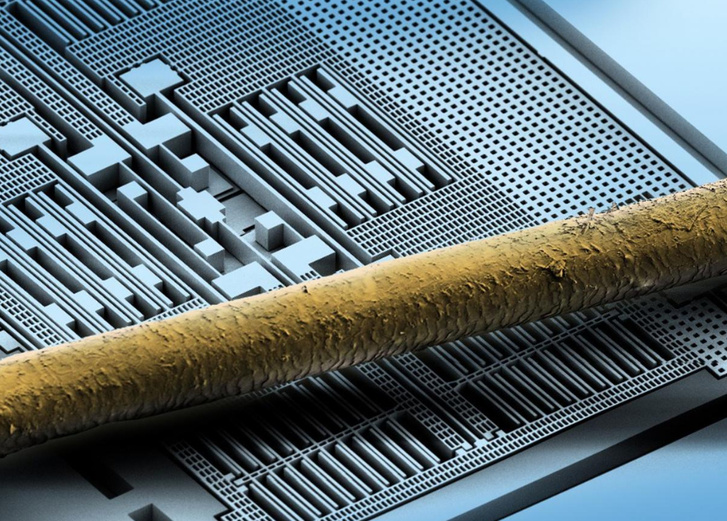
Az egész vákuumban van, a rugók szilikonból készülnek, az elmozduló súly pedig egy bolháknak készült fésűre emlékeztet. A giroszkópok pedig a forgás szöggyorsulását mérik, akár három tengelyen is, így pontos képet alkothat a számítógép, hogy a motor merre és milyen mértékben kanyarodik, vagy elemelkedett-e az egyik kerék. Mindezt egy apró chipbe építik bele. És ezek a chipek a tömeggyártásnak köszönhetően egyre olcsóbbak.
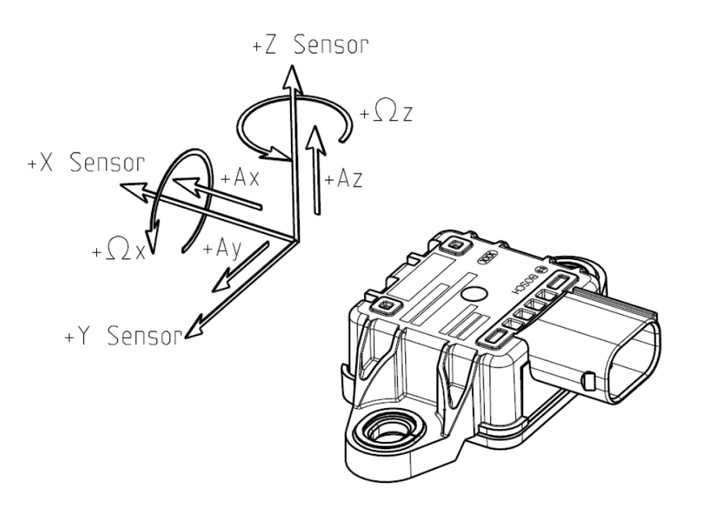
A motorkerékpároknál használt IMU-k hat tengelyen mérnek: gyorsulást három irányban, és másik hármon elfordulást. A teljesség kedvéért legyen meg, hogy vannak motorok, amelyek öt tengely adataiból dolgoznak, ráadásul elég jól, illetve léteznek kilenc tengelyes MEMS IMU-k, melyeknél a további három tengely a Föld mágneses mezőjéhez viszonyított helyzetet vizsgálja, de ez a motoripar szempontjából irreleváns, inkább repülőgépek navigációs berendezéseihez lehet hasznos, az ABS-ek és a kipörgésgátlók kiszolgálásának szempontjából érdektelenek.
Motorkerékpárhoz tehát elég öt vagy hat tengely, amelyekről minden információ elérhető, amelyre egy kipörgésgátlónak, ABS-nek vagy egy félaktív futóműnek szüksége lehet. És ehhez jön hozzá a fojtószelep pozíciója, a keréksebesség, a fékerő, esetleg a futómű mozgása, és ezekből már a számítógép pontos képet kap arról, hogy mi történik éppen a motorkerékpárral. Ezt a képet össze tudja hasonlítani az előre programozott paraméterekkel, amiktől ha bizonyos mértékű eltérést észlel, tudni fogja, hogy a motoros biztonsági zónán kívülre merészkedett.
A gyártók között jelentős eltérés lehet, hogy ki mit tekint biztonsági zónának, sőt, motoron belül a különböző üzemmódokban is más-más a beavatkozási szint. Például race módban teljesen normális a finoman csúszó hátsó- és az időnként elemelkedő első kerék, hiszen versenypályán ezek átlagos mozgások, míg ugyanezek eső- vagy túramódban már kivédendő, balesetveszélyes szituációk.
A szoftver és a hangolás tehát márkánként változó, viszont az adatokat szolgáltató hardver ugyanaz: ezen a téren a Bosch a piacvezető, ők mutatták be az első MEMS komponenst még 1998-ban, és jelenleg akkora az előnyük, hogy az összes IMU-s motorkerékpárnak ők a beszállítói.
Lehet vitatkozni arról, hogy jó-e az ilyen szintű felügyelet, de úgy gondolom, elég, ha csak egyszer menti meg az életed egy ilyen, már megérte az egész.
